-
汎用荷物を運搬可能なクローラー型自律ロボットの研究
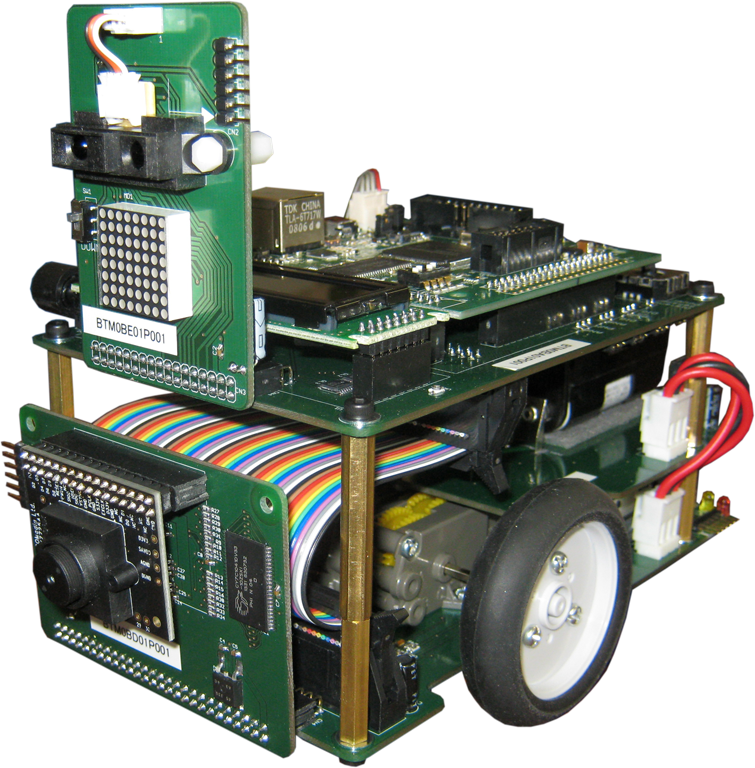
本研究では,警備や荷物運搬,人の搭乗を伴う移動支援といった用途に対応可能なクローラー型自律ロボットを実現するため,上部構造をユニット化したロボットの開発を目的とする.本機は,使用目的に応じてユニット化した上部構造を容易に交換できる設計にしている.この構成により,多目的に運用できる.例えば,夜間に自律で巡回する警備ロボット,台車の代わりとなる荷物運搬ロボット,人を乗せて不整地を走行できる車椅子ロボットなどを想定している. -
開眼片足立ちの自動判定システムの高精度化
開眼片足立ちとは,体力測定の項目の一つである.目を開けた状態で腰に手を当て,片足で立つ状態を保てるか計時する.現在の体力測定では,開眼片足立ちの判定を人間が目で見て確認しながら行っている.そのため,確認する人によって判定が偏り,判定ミスが発生してしまう可能性がある.
本研究では,機械学習による開眼片足立ちの自動判定システムを高精度化することによって,より客観的で正確な判定を可能にすることを目的としている. -
農業用水路の継続的な監視を目的としたUIの構築
日本国内には無数の農業用水路が存在し,我々の住む長野県内には特に多くの水路がある.また,農業用水路のような小規模な水路は,一級河川とは異なり,各市区町村の管轄であり,正確な管理が行き届いていないのが現状である.しかし,近年の異常気象の増加に伴い,農業用水路はしばしば氾濫を起こしている.その際には長野市役所河川管理課の担当者が現場の調査に赴く必要があり,作業に時間がかかる,通報当時と状況が異なるなど,問題があった.それらを解決するために,リアルタイムで水路の状況を確認することを目的としたインタフェースを開発した.また,副題として長野市内に設置することを目的に設計・製作している水位計の性能評価を行った. -
電子部品用在庫管理システムの開発
近年,電子部品の種類や管理点数の増加により,多くの研究室や小規模な開発現場でも,在庫管理の重要性が高まっている1).しかし,表計算ソフトや手作業による管理では,在庫数の把握ミスや情報更新の遅れが生じやすく,結果として管理負担の増大や業務効率の低下を招くという課題がある.
本研究では,複数の研究室での量を想定した電子部品用在庫管理システムを開発し,部品情報音在庫数をデータベースで一元管理することで,管理作業の効率化と正確性の向上を目指す.
2025年度の卒業研究
- Details
- Written by: 芦田和毅